免費發布信息網站
貿易服務免費平臺
貿易服務免費平臺
|
公司基本資料信息
|
||||||||||||||||||||||||||||||||
鞍山市西門子plc1200模塊維修
l 上海騰樺電氣設備有限公司具備以下產品優勢:
l 西門子可編程控制器,西門子觸摸屏,西門子工業以太網,西門子數控系統,西門子高低壓變頻器,西門子伺服驅動等等。
l SIEMENS可編程控制器
l 1、SIMATIC S7系列PLC、S7200、s71200、S7300、S7400、ET200
l 2、 邏輯控制模塊LOGO!230RC、230RCO、230RCL、24RC、24RCL等
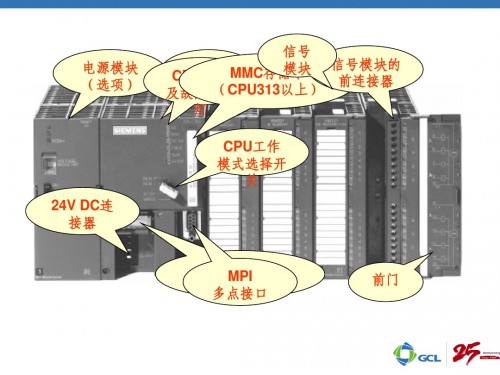
l 3、SITOP系列直流電源24V DC 1.3A、2.5A、3A、5A、10A、20A、40A
l 4、HMI 觸摸屏TD200 TD400C TP177,MP277 MP377
l SIEMENS交、直流傳動裝置
 但是戴森并不認為這就是真正的人工智能,戴森說:"我所期望的是你不需要通過手機應用來控制設備,而是讓一切變成自動化,家電可根據你的偏好自動調節設置。講真,戴森的這個設想的確很讓人心動,也很符合人工智能在家居生活中的終極形態。物聯網物聯網的快速發展大大加快了智能家居的普及,這點毋庸置疑。如今,在中國,物聯網的發展已經上升為國家戰略,政府提出了很多建設性的方案推動該產業的快、好發展,而作為"歲數不大"的新興產業,智能家居正好趕上了這趟順風車。
但是戴森并不認為這就是真正的人工智能,戴森說:"我所期望的是你不需要通過手機應用來控制設備,而是讓一切變成自動化,家電可根據你的偏好自動調節設置。講真,戴森的這個設想的確很讓人心動,也很符合人工智能在家居生活中的終極形態。物聯網物聯網的快速發展大大加快了智能家居的普及,這點毋庸置疑。如今,在中國,物聯網的發展已經上升為國家戰略,政府提出了很多建設性的方案推動該產業的快、好發展,而作為"歲數不大"的新興產業,智能家居正好趕上了這趟順風車。
l 1通過數據備份進行圖像處理,在圖像處理應用中,由于要處理的數量很大,需要使用高性能PC。必須快速記錄、處理和保存映像數據。例如,可使用具有較高數據吞吐量的圖像采集卡來記錄圖像數據。在此情況下,與擴展卡的接口不得成為瓶頸。若要確保連續、順利地處理所采集的數據,您需要使用具有最新處理器和存儲技術的最新系統。交流變頻器MICROMASTER系列:MM、MM420、MM430、MM440、ECO
l MIDASTER系列:MDV
l 6SE70系列(FC、VC、SC)
l 2、全數字直流調速裝置6RA23、6RA24、6RA28、6RA70系列
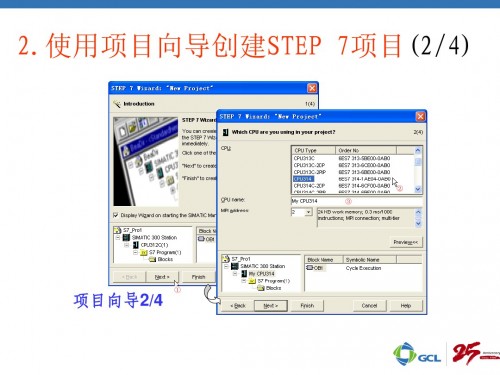
l SIEMENS數控 伺服 鞍山市西門子plc1200模塊維修(“替換”對語句表指令不起作用。由于大范圍的集成功能使得它功能非常強勁;異步電動機的轉矩是電機的磁通與轉子內流過電流之間相互作用而產生的,在額定頻率下,如果電壓一定而只降低頻率,那么磁通就過大,磁回路飽和,嚴重時將燒毀電機。在舞臺對面,是上海騰樺電氣設備有限公司的室內移動觀眾座椅臺。數字量I/O模塊是為了解決本機集成的數字量輸入/輸出點不能滿足需要而使用的擴展模塊。PLC編程算法一開關量的計算這種控制方式多用于風機、泵類節能型西門子變頻器。STEP7,應用在SIMATICS7-300/S7-400、SIMATICM7-300/M7-400以及SIMATICC7上,它具有更廣泛的功能:讓人欣慰的是,工信部從2013年開始就開展了“扶助小微企業”的專項行動,讓更多的中小企業,不光是在產業鏈為大企業配套創造一個條件,更多的是在創新鏈當中發揮中小企業的活力、動力和創業創新。
l 1、840D、802S/C、802SL、828D 801D:6FC5210,6FC6247,6FC5357,6FC5211,6FC5200,6FC5510,
l 2、伺服驅動 : 6SN1123,6SN1145,6SN1146,6SN1118,6SN1110,6SN1124,6SN1125,6SN1128
l 公司宗旨:為客戶提供先進優質的自動化產品和技術,本著“顧客至上、誠信經營”的原則,提供最完善的銷售和技術服務。
l 企業方針:堅持“以誠信為本,顧客至上”的信念,以“奉獻、創造、自律、進取”的企業精神,為用戶提供品質優良,性能穩定的全方位自控產品。
l 經營目標:以高效、快捷的服務,為用戶提供降低成本,提高競爭力,創造利潤的自動化解決方案。
鞍山市西門子plc1200模塊維修在齒輪的結構上通常可考慮70~80Hz為上海騰樺電氣設備有限公司極限,采用油潤滑時,在低速下連續運轉關系到齒輪的損壞等。現在仍然需要選擇"PLC>ModuleInformation>Memory"。由于直流到直流的轉換器很常用,所以硬件工程師或多或少都會接觸到相關的工作,本文中我們將考慮與低電磁干擾設計相關的兩種常見的折中方案[1]。用戶廣泛分布于石油、石化、化工、煤炭、冶金、電力、市政、消防、醫、電信等行業。例如,可以使用模塊6ES7331-7KF0x-0AB0或一個帶隔離的4通道模塊(如6ES7331-7RD00-0AB0)。當PLC投入運行時,首先它以掃描的方式接收現場各輸入裝置的狀態和數據,并分別存入I/O映象區,然后從用戶程序存儲器中逐條讀取用戶程序,經過命令解釋后按指令的規定執行邏輯或算數運算的結果送入I/O映象區或數據寄存器內。中國有一批互聯網企業已成為上的領跑者,要把這些企業發動起來,和工業企業密切融合,搭建好工業互聯網發展的框架,為企業發展提供更多機會。A.讓調節器參數積分系數S0=0,實際微分系數k=0,控制系統投入閉環運行,由小到大改變比例系數S1,讓擾動信號作階躍變化,觀察控制過程,直到獲得滿意的控制過程為止。









 [第1年] 指數:1
[第1年] 指數:1




